






Anyone who's seen a gecko knows how sticky their toes are. The newest robotic gripper devised by California-based researchers takes a cue from those clingy lizards. The soft robot can grasp a much wider variety of objects, including some that were too slippery for previous robot hands, according to a NewsWise article.

Geckos can climb almost anything thanks to the millions of tiny hairs on their toes. Each strand ends in nanostructures that can interact with the atoms of the material it's scaling.
This natural mechanism was successfully replicated by a joint effort between Stanford University and NASA's Jet Propulsion Lab. The synthetic "gecko-inspired adhesive" worked best when in contact with a large surface area, so it was mainly applied to walls and other flat surfaces.
Its developers teamed up with engineers from the University of California San Diego (UC San Diego) to build a soft robot gripper. A coat of the adhesive was applied onto the fingers of the gripper. This increased the surface area that touched the object, which improved its grip.
“We realized that these two components, soft robotics and gecko adhesives, complement each other really well,” said UC San Diego researcher Paul Glick, who served as the first author of the study.
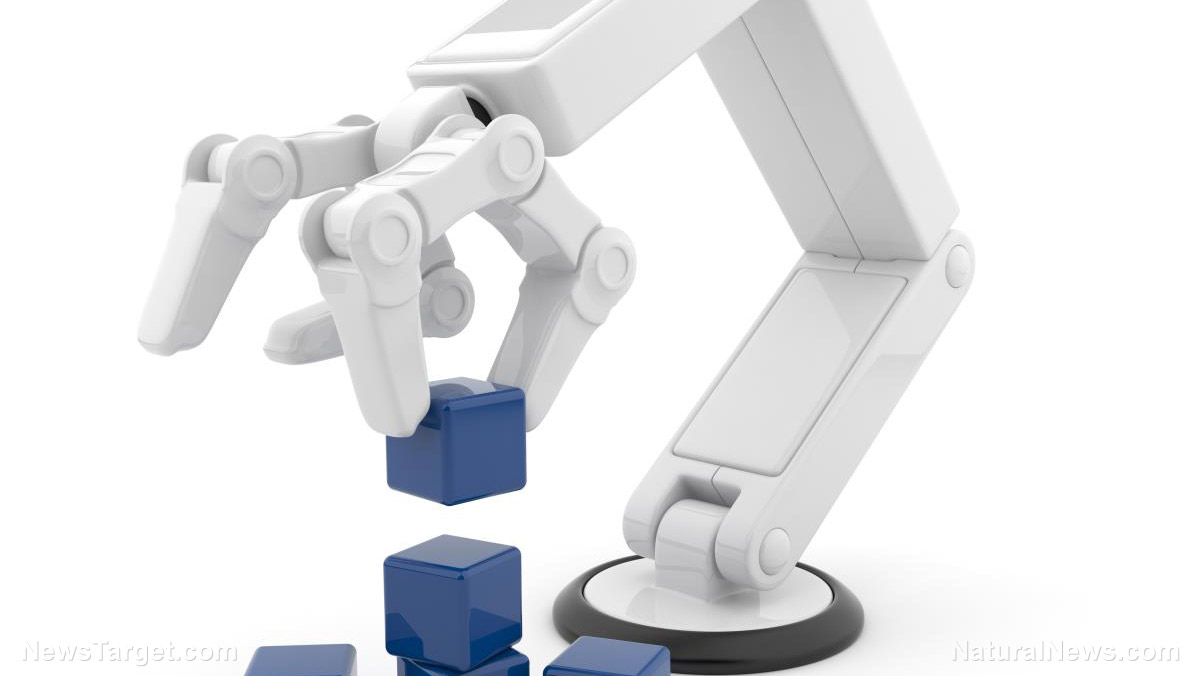
Sticky fingers can pick up what no other gripper has grabbed before
The new robotic gripper can grasp both smooth and rough objects from different angles. Rated for a maximum load of 45 pounds, it's intended to work in places as mundane as a factory to environments as exotic and hostile as outer space.
The happy marriage of gecko-inspired adhesives and soft robotics allowed the new design to handle objects that would have given its individual components grief. The gripper is able to grab and manipulate objects that would have been too slippery for either the adhesive or the robot's pneumatic-powered fingers.
The UC San Diego engineering team reported that they solved a recurring flaw of pneumatic-powered soft fingers. Equations derived from a 1970s study allowed Glick and his team to prevent the bulging tendency of inflated digits. The gripper could now apply the right amount of force upon the entire length of each finger.
Furthermore, they were able to maximize the performance of the gecko adhesive on non-flat surfaces. They used a durable silicone fabric that resists stretching but permits bending. The fabric is embedded in each finger, which is securely clamped to the base to prevent excessive deformation.
Thanks to this clever combination of soft and stiff materials, the soft fingers of the robotic gripper can adjust themselves around objects while also being able to withstand heavy loads. (Related: Robot with advanced cyber-hand put to work harvesting cauliflower for the EU.)
3D printing and spin coating processes promise easy manufacturing
The gecko-inspired adhesives follow a three-step manufacturing process. The first step involves the creation of a master mold in a sterilized room. This original mold will serve as the basis for multiple wax copies.
The researchers apply a thin film of material upon each wax mold while the latter is slowly spinning. This process is called spin coating and can produce anywhere from 10 to 20 adhesive sheets in less than an hour. Each wax model can be used multiple times.
The soft robotic gripper is built via 3D printing molds out of silicone-based rubber. The adhesive sheets are then applied to the fingers of the robot.
The JPL-UC San Diego research team is currently writing the computer code for grasping. They are planning to test the robotic gripper for use in zero-gravity conditions and outer space.
Read more stories about the newest developments in robotics at Robotics.news.
Sources include:








Please contact us for more information.